華儒科技:全面解析雷達傳感器技術(shù)
1)、倒車雷達模塊
2)、倒車雷達報警顯示
3)、倒車雷達傳感器
4)、TCM模塊(傳送檔位信息)
5)、ECM模塊(傳送車速信號)
6)、BCM模塊(觸發(fā)蜂鳴器)
13、原理
工作原理:超聲波作為一種特殊聲波,同樣具有聲波傳輸?shù)幕疚锢硖匦裕捶瓷洹⒏缮妗⒀苌洹⑸⑸洹3暡ň褪抢闷浞瓷涮匦浴3暡òl(fā)射器不斷的發(fā)射出40KHz超聲波,遇到障礙物后反射回反射波,超聲波接收器接收到反射信號,并將其轉(zhuǎn)換為電信號,測出發(fā)射與接收到反射波的時間差t,即可求出距離。
s=1/2ct其中c為超聲波音速。由于超聲波也是聲波,所以與溫度有關(guān)。
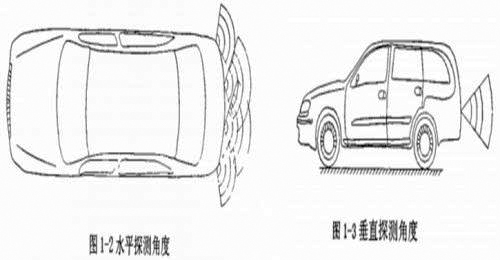
圖4
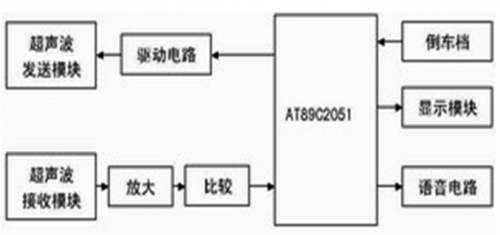
圖5
14、自動泊車系統(tǒng)
通常的泊車輔助系統(tǒng)是通過安裝倒車雷達或后視影像系統(tǒng),在泊車時給司機起到提示作用,以避免碰撞。而自動泊車系統(tǒng)的基本功能是能夠控制車輛自動完成泊車,在此過程中可以不需要司機的干預(yù)。這樣一種系統(tǒng)可以有效解決了新手司機泊車的煩惱,提高了車輛的智能化水平。
15、自動泊車系統(tǒng)的基因組成
1)、傳感器系統(tǒng)。主要用來探測環(huán)境信息,尋找車位并實時反饋車輛位置信息。
2)、中央控制系統(tǒng)。主要用來處理環(huán)境感知信息,并在線實時計算目標(biāo)車位參數(shù)和車輛相對位置,判斷可行性并確定自動泊車策略。
3)、執(zhí)行系統(tǒng)。主要根據(jù)中央控制系統(tǒng)的決策信息,控制方向盤和動力系統(tǒng),忠實地按照決策路徑控制車輛運動到泊車位。
16、自動泊車系統(tǒng)運行的基本過程
1)、通過傳感器系統(tǒng)感知環(huán)境信息
2)、根據(jù)傳感器系統(tǒng)的信息得出有效車位信息、車輛相對位置,從而決策泊車初始位置
3)、電子控制單元(Electronic Control Unit,簡稱ECU)根據(jù)傳感器信息,實時進行環(huán)境建模,生成車輛運動路徑,控制車輛無碰撞地自動運動到泊車位。
17、研究方法
1)、基于路徑規(guī)劃方法的研究
路徑規(guī)劃方法通過生成既定路徑控制車輛的運動軌跡。這種方法依賴于控制器的精確性,控制效果并非完全可靠。在泊車過程中,即使位置誤差能夠被后來的運動所補償,也會增加相應(yīng)的時間成本,從而影響自動泊車的效果。
2)、基于經(jīng)驗方法的研究
采用智能控制算法對自動泊車問題進行研究。以模糊控制方法為例,在獲得小車的方向角后,基于小車相對泊車位置的縱向和橫向距離,對不同的泊車位置,不同的泊車階段會產(chǎn)生不同的模糊規(guī)則。模糊控制會在每一個采樣周期,根據(jù)小車相對于泊車位置的相對位姿,產(chǎn)生一個控制命令,可以有效補償系統(tǒng)誤差。
18、傳感器選擇
自動泊車系統(tǒng)需要利用各種傳感器,獲得車輛的車身偏向角、轉(zhuǎn)向角度、速度、位移、障礙物形狀及位置等信息。顯然,所知信息越多,控制難度越小。事實上,目前的傳感器技術(shù)并不能完全提供以上信息,而且有的物理量,實時準(zhǔn)確地獲取其數(shù)值所需付出的代價較大,而它們對于控制過程的價值卻不大。選擇方案如下:
 粵公網(wǎng)安備 44030902003195號
粵公網(wǎng)安備 44030902003195號